Infoportal
Dies ist eine alte Version des Dokuments!
The Acontis EtherCAT Stack
Class A and Class B
The Acontis stack is divided into two parts. The Class B Master forms the basis. The Class A Master is an addon that allows synchronization with Distributed Clocks (DCM = Distributed Clocks Master Synchronization).
Software libraries and components
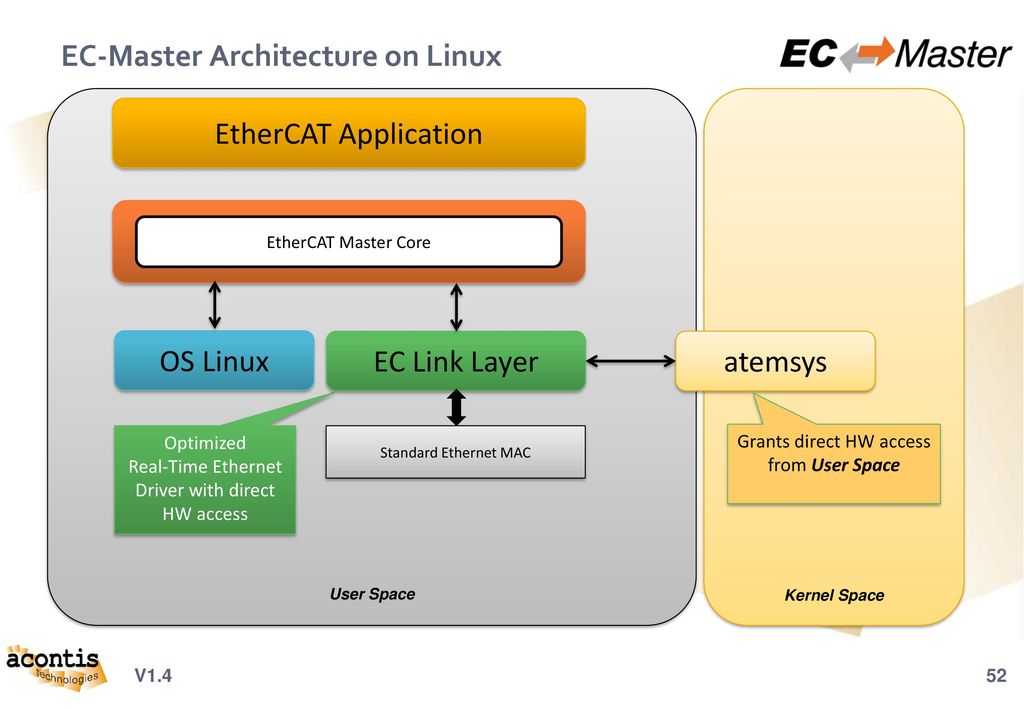
- EtherCAT Master Core[libEcMaster.a]
- Base of the EtherCAT stack.
EC-Master-V2.9-Linux_x64-Eval/SDK/LIB/Linux/x64/libEcMaster.a
- atemsys [atemsys.ko]
- Linux kernel module. Grants direct HW access from user space.
- Must be compiled for the kernel used.
EC-Master-V2.9-Linux_x64-Eval/Sources/LinkOsLayer/Linux/atemsys
- EC LinkLayer [libemllI8254x.so]
- Library EtharCAT Master Link Layer for Intel8254X EtherNet hardware.
- Special Ethernet hardware driver optimized for use with EtherCAT.
- Replaces the installed ethernet driver
- Different LinkLayer may be needed for different Ethernet Hardware
- Check compatibility list in EC-Master_ClassB.pdf 2.3.1.3 Supported network controllers
EC-Master-V2.9-Linux_x64-Eval/Bin/Linux/x64/libeml8254x.so
 „EC-Master-V2.9-Linux_x64-Eval/SDK/LIB/Linux/x64/libAtemRasSrv.a“ Remote API Server, i.e. with EC-Lyser (optional?)
„EC-Master-V2.9-Linux_x64-Eval/SDK/LIB/Linux/x64/libAtemRasSrv.a“ Remote API Server, i.e. with EC-Lyser (optional?)
EEROS only components
These components are only required if the stack is used together with EEROS.
- EEROS Application [movingchair] The control application itself which is specially designed for each individual robot.
- EEROS [libeeros.so] the roboter framework.
- [ecmasterlib] Interface between Acontis and EEROS application (from NTB addapted EC-Demo of acontis „
EC-Master-ClassA-AddOn-V2.9/Examples/EcMasterDemoDc“)