Infoportal
Dies ist eine alte Version des Dokuments!
Understanding Synchronisation with Distributed Clocks
The Sync0 Synchronisation Signal
In a DC system each participant has its own clock which is synchronized with all other clocks. The Sync0 event is triggered synchronously by all participants.
The Sync0 Event
The Sync0 event ist triggered on all devices of the network at the same time. The slaves can read inputs and set outputs after a deterministic and configurable time after the Sync0 event. Thus it is possible that all outputs in the whole network are set simultaneously within nanoseconds. It is also possible to set the outputs with a desired time delay.
DCM Master Shift Mode
In „DCM Master Shift Mode“ the hardware clock of the first slave is used as main clock. All slave clocks as well as the master clock are synchronized with this clock.
The jitter of the master has no direct influence on the jitter of the Sync0 event. However, if the jitter of the master is too high and the period too short, an EC frame may be sent too late. The slaves then do not receive the data sufficiently early before the next Sync0 even is triggeredt.
 : corresponding error message
: corresponding error message
DCM Bus Shift Mode
In „DCM Bus Shift Mode“ the clock of the master is used as the main clock. All slaves are synchronized with the clock of the master. The jitter of the master directly influences the jitter of the Sync0 event.
Master
After the Sync0 event, the received data from the Ethernet driver are first copied into the buffer of the Acontis stack on the master. Then the application can evaluate the received data and set the outputs. As soon as the cyclic job of the application is completed, the EC Frame is sent from the stack.
The period between the frames is only deterministic to a limited extent. In this mode only the period between the Sync 0 events is deterministic!
Example Setting and Read with a ELMO EtherCAT Slave
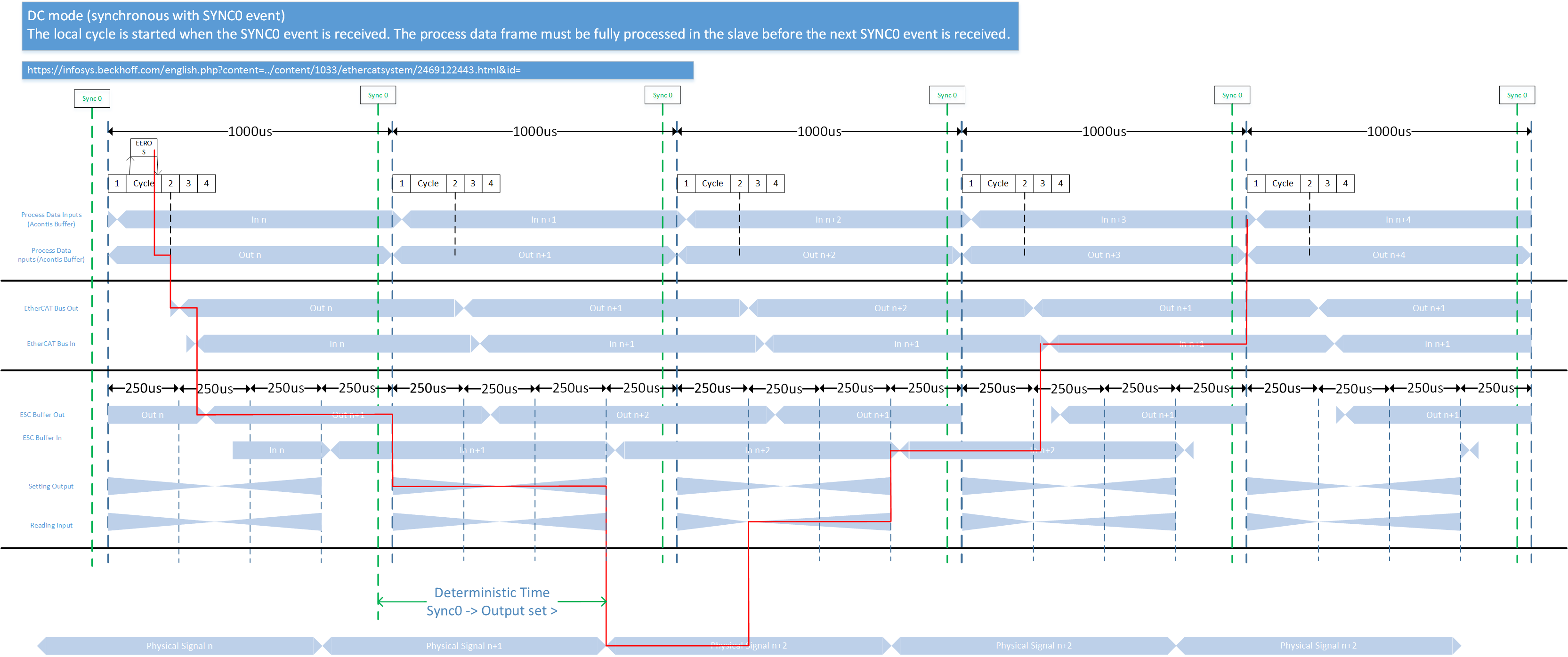
This example shows the flow of a signal through an EtherCAT network.
- The application sets a signal (e.g. a torque signal) which is forwarded from the Acontis stack to the EC bus.
- The stack sends the EC frame after the application is finished.
- The value is buffered in the ESC (EtherCAT Slave Controller) memory of the Elmo drive as soon as the EtherCAT frame is received from the Slave.
- With an Elmo Drive it takes up to 750 us until the physical output is set and valid after the Sync0 signal.
- Approx. 250 us after the next Sync0 signal the physical signal is captured again.
- After another 500 us, the value is buffered in the ESC's buffer memory.
- With the next EtherCAT frame the value is sent to the master.
- After the next Sync0 event the application can evaluate the signal.